Hvordan ser vi under vann?
Nei – det er ikke bare å ta på seg badebriller. Den beste måten å se under vann, er å bruke lyd, akkurat som flaggermusen gjør når den flyr i lufta.

Lyd går langt under vann. Hvis det er et jordskjelv i Japan, kan det høres under vann ved kysten av Chile på andre siden av Stillehavet. Hvaler bruker lyd til å kommunisere over lange avstander.
Denne fysiske egenskapen ved vann kan også brukes av oss mennesker hvis vi vil finne ut hva som befinner seg under vannet. Når du dykker blir det fort mørkt. Og lyset du har med deg rekker bare noen meter, så vanlige kameraer ser ikke veldig langt. Det gjør heller ikke radarer..

Men hvis du sender ut lyd og bruker instrumenter som danner et bilde basert på ekkoet som kommer tilbake, akkurat som en flaggermus gjør, kan du se langt under vann.
Instrumenter som bruker lyd for å kartlegge, kalles sonarer. (Sound navigation and ranging – navigasjon og avstandsmåling med lyd).
Det finnes mange ulike sonarer, fra enkle dybdemålere, som finnes på fritidsbåter, til ekkolodd, som viser fiskestimer og andre objekter i vannsøylen, og mer avanserte sonarer som danner detaljerte bilder av havbunnen. Sistnevnte krever stor datakraft og avanserte algoritmer for å forandre ekkoene til visuelle bilder.
Forsvaret bruker sonarer både i minejakt, ubåjakt og generell havbunnskartlegging. Sonarer brukes også i det sivile for å inspisere rørledninger og annen viktig infrastruktur under vann.
I denne ukens episode av Ugradert møter du Torstein Olsmo Sæbø. Han har forsket på sonarer ved FFI siden 2002, og har vært sentral i utviklingen av den norske ubemannede ubåten Hugin.
I denne episoden forklarer han hemmeligheten bak teknologien.
Fra verdensrommet til havbunnen
Sæbø skulle egentlig jobbe med astrofysikk – alt som skjer ute i verdensrommet. Det var i alle fall det han tok hovedfag i ved universitetet. Men tilfeldighetene førte ham i stedet til FFI der han nå jobber med å løse dyphavets hemmeligheter.
– Det er mange fellestrekk mellom astrofysikk og det jeg jobber med i dag. Du skal lage systemer for å behandle store mengder data. Du måler noe og bruker dataene som kommer inn for å danne deg et bilde av hvordan virkeligheten er rundt deg, sier Sæbø.
Han fikk lov til å være med helt fra starten på å utvikle noe som heter syntetisk aperture sonar (SAS).
Når du skal ta bilder av havbunnen, som av alt annet, er oppløsning viktig. For å få god oppløsning trenger du egentlig en veldig lang sonar (ja, her er det lengden det kommer an på). Men så store sonarer får du ikke plass til i små ubåter.
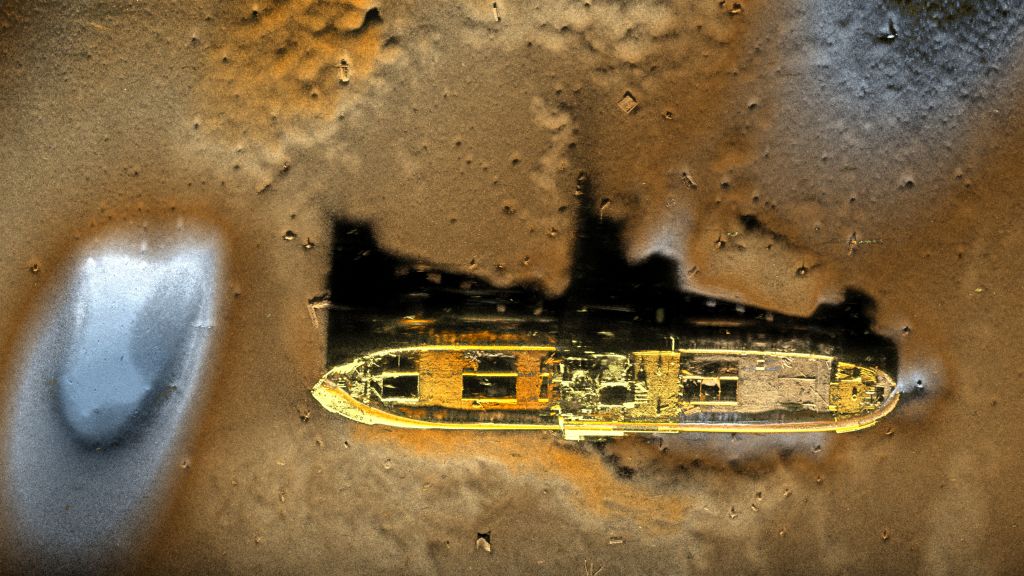
Disse sonarbildene er fra et tokt i Skagerrak og viser skip som ble fylt med kjemisk ammunisjon og dumpet etter andre verdenskrig. Data er samlet inn med HUGIN AUV og Kongsbergs HISAS sonar. Toktet er kjørt med FFIs forskningsskip H.U. Sverdrup II.
Etter krigen ble skip fullastet med kjemiske stridsmidler senket på utpekte steder i Skagerrak. FFI har kartlagt hvordan det står til med vrakene, på oppdrag for Kystverket. Bildet er satt sammen av data som AUV-en Hugin har samlet inn mens den kjører. Foto: FFI

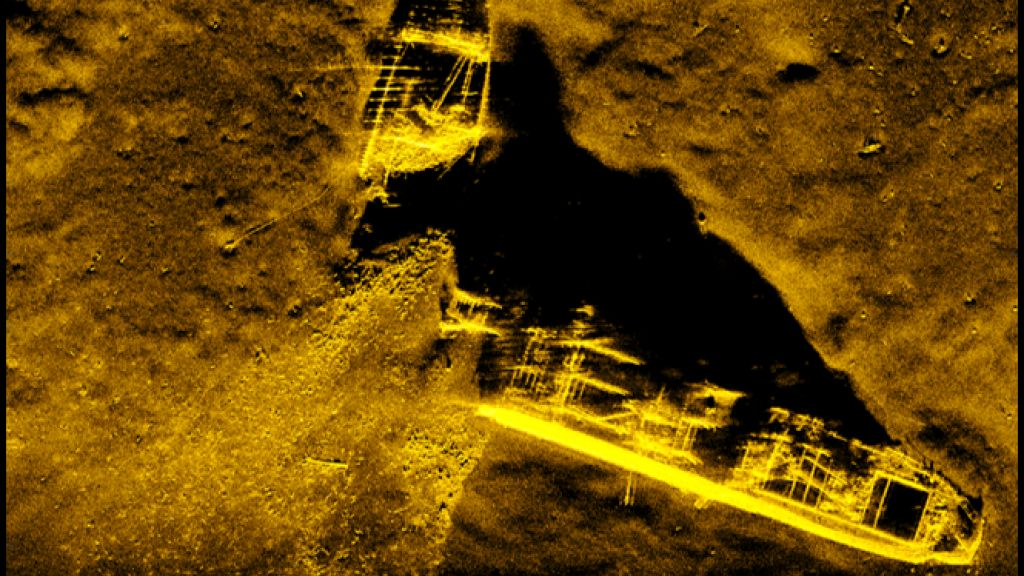
Disse sonarbildene er fra et tokt i Skagerrak og viser skip som ble fylt med kjemisk ammunisjon og dumpet etter andre verdenskrig. Data er samlet inn med HUGIN AUV og Kongsbergs HISAS sonar. Toktet er kjørt med FFIs forskningsskip H.U. Sverdrup II.

Disse sonarbildene er fra et tokt i Skagerrak og viser skip som ble fylt med kjemisk ammunisjon og dumpet etter andre verdenskrig. Data er samlet inn med HUGIN AUV og Kongsbergs HISAS sonar. Toktet er kjørt med FFIs forskningsskip H.U. Sverdrup II.
For å få plass til en sonar i Hugin måtte forskerne tenke nytt.
– I stedet for å bruke en lang sonar, utviklet vi en måte å sette sammen dataen ubåten samler inn mens den kjører for å syntetisere bilder med stor oppløsning. Vi setter sammen data sonaren har fått inn fra ulike vinkler, og genererer et nytt og bedre bilde, forklarer Sæbø.
– Dette virket jo ikke i Norge eller noen andre steder i verden da vi begynte å jobbe med det. Vi har vært på konferanser over hele verden, og har vært helt i forkant av dette arbeidet. Vi har vært med å utvikle det fra en teknologi som veldig få trodde på, til det som er en ledende teknologi innenfor visse anvendelser. Det har vært moro, sier Sæbø.

Vil bruke kunstig intelligens
I dag tolkes sonarbilder ofte manuelt, av eksperter som er trent på oppgaven.
Sæbø forteller at kunstig intelligens kommer til å bli viktig for å tolke sonardata og få raskere nytte av bildene. På den måten kan små ubemannede ubåter lære seg å tolke sine egne bilder, slik at den skjønner når den har funnet en mine eller noe annet viktig på havbunnen.
KI kan også brukes i ubåtjakt, for å finne svake signaler i en støybakgrunn på sonarbilder.
– KI er en kjempeviktig byggestein. Men det er krevende. For KI må ha data for å trenes opp. Det er lett å trene opp KI til å kjenne igjen bilder av katter. Vi har ikke like mye data for gjenstander på havbunnen. Derfor tar det lenger tid å trene opp KI som kan tolke sonardata, sier Sæbø.

Ubemannede ubåter som kjører alene i ukesvis
Trenden akkurat nå går mot større ubemannede undervannsfarkoster som kan operere på egen hånd og kartlegge farvann i flere uker eller måneder uten at du er der og har kontroll på dem. Da er det flere utfordringer som må løses, sier Sæbø
– Navigasjon er krevende, fordi du ikke har GPS (satellittnavigasjon) under vann. Og det er krevende i seg selv å lage systemet robust nok, altså at det ikke går galt når farkosten kjører alene. Det vanlige er å ha et skip i nærheten, som kan fikse problemer når de oppstår. Det kan være helt enkle feil, som at ubåten setter seg fast i et fiskenett eller navigerer feil. Når du ikke har et skip i nærheten, må du ha redundans – det vil si to computere, to sensorer, to av alt, slik at den selv kan finne en løsning når noe går galt.